Project Overview
Project Members:
- aliazzz (admin)
Monarco Hat v1.0.0.0 Package &
Monarco Hat Realtime Clock SRAM Support Package
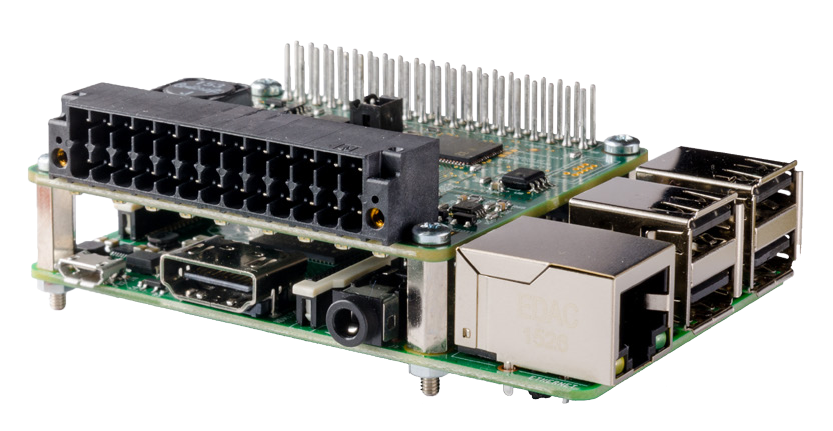
The Monarco HAT
The Monarco HAT is a robust industrial graded HAT, perfectly suited for IOT projects, small home-automation or industrial projects and much more ...
It also protects your Raspberry Pi from overvoltage or short-circuiting and simultaneously provides you with enough IO channels and channel configuration versatility.
It features analog and digital inputs and outputs, RS-485, 1-Wire bus and a Real Time Clock.

The Monarco Hat driver is v1.0.0.0 implemented as an FB device-driver. You can program your code in any language you desire, either visual or textual.
- 100% Open source,
- 100% Pure IEC 61131-3 code (ST)
Changelog
v1.0.0.0 Released
FB based driver including demo project
Retain data support via RTC (separate Buffered SRAM Package)
<DeviceIdentification>
<Type>501</Type>
<Id>FFFF 0005</Id>
<Version>1.0.0.0</Version>
</DeviceIdentification>
Hardware prerequisitories
- A Raspberry Pi, see https://www.raspberrypi.org/
- A Monarco HAT, see https://www.monarco.io/
- At least an 8 GB SD Card ...
Hardware installation and setup
Attach Monarco HAT to Raspberry Pi and power it up;
sudo cat /proc/device-tree/hat/vendor
should return "REX Controls".
sudo cat /proc/device-tree/hat/product
should return "Monarco HAT".
Disable system console on UART
sudo sed 's/ console=serial0,[0-9]\+//' -i /boot/cmdline.txt
sudo reboot
Install essential tools
sudo apt update
sudo apt install git
Flash Monarco HAT EEPROM (to avoid manual installation of overlay)
sudo git clone https://github.com/monarco/monarco-hat-firmware-bin
cd monarco-hat-firmware-bin
./monarco-eeprom.sh update
Software prerequisitories
- CODESYS V3 IDE available at https://store.codesys.com/codesys.html,
- CODESYS Raspberry Pi .package available at https://store.codesys.com/codesys-control-for-raspberry-pi-sl.html,
- CODESYS Raspberry Pi SL Demo or License (The Demo is unrestricted in technical capabilities but will only run for two hours straight, after which it stops and you have to set it in run again yourself by logging in)
- Contents of SVN directory : SVN
Codesys Runtime installation
Installing CODESYS runtime component on pi (Demo or licensed), just follow CODESYS online help steps, it's easy!
https://help.codesys.com/webapp/_rbp_install_runtime;product=CODESYS_Control_for_Raspberry_Pi_SL;version=3.5.12.0
Or check this youtube video:
[[embed url=https://youtu.be/6FPf3RHWyeU]]
Package installation
Monarco Hat v1.0.0.0 Package &
Monarco Hat Realtime Clock SRAM Support Package
Monarco UART configuration
Enable CODESYS to use the RS485 UART on the Monarco Hat.
Switch to etc direcory and edit the CODESYSControl.cfg;
cd etc/
sudo nano CODESYSControl.cfg
Add the following lines;
[SysCom] Linux.Devicefile=/dev/ttyAMA
Now save and Quit nano.
Now, do a forced NTP sync
sudo timedatectl
This will force to sync time with some time server and returns something like, depending on date/time and your time-zone;
Local time: zo 2018-09-23 14:46:17 CEST
Universal time: zo 2018-09-23 12:46:17 UTC
RTC time: zo 2018-09-23 12:46:18
Time zone: Europe/Amsterdam (CEST, +0200)
Network time on: yes
NTP synchronized: yes
RTC in local TZ: no
Now you can use the HAT, RS-485 and the Real-Time Clock from within a CODESYS IEC application.
Access the RS485 UART via a comlib of you own flavour in CODESYS (like CAA SerialCOM library).
Running the CODESYS project
Open the provided example project file.
Check/Set SPI master parameters:
Mode 0,
SPI bits 8,
Speed(Hz) 1000000 (=1MHz) => can be set up to 4 MHz, slower speeds avoid chance on crc errors
Compile, download and run and enjoy!
Limitations / Bugs
All functionality of the HAT is implemented into the core of the driver. However I have no illusion that this driver will still contain bugs.
Due to limited time resources, I am not able to solve every bug anymore, sorry...
As this opensource software you are cordially invited to fix the bug and share your solution via a ticket.
v2.0.0.x Experimental and under construction, NOT RECOMMENDED unless you like to tinker
IO based driver
devdescr.xml: vendor id set to 0004, device id set to 0005, see https://forge.codesys.com/drv/io-drivers/database/Home/ for details.
<DeviceIdentification>
<Type>501</Type>
<Id>0004 0005</Id>
<Version>2.0.0.2</Version>
</DeviceIdentification>
- Ctrl Byte,
- HWConfig,
- UserLeds,
- UserLedMask
- Retain data support via RTC (separate Buffered SRAM Package)
For the package and the source of v2, see the SVN repo under tags
Acknowledgements
v1 Realised in 2017.
Special thanks goes out to Ingo Hornberger for helping out with difficulties and for his patience.
Monarco Hat Package &
Monarco Hat Realtime Clock SRAM Support Package